Multicopter sind so ein Hobby, bei dem es beinahe schwer fällt, mal nicht in der Werkstatt zu stehen. Klar geht es in erster Linie um das Fliegen, die einfache Konstruktion und die vielen Verbesserungsmöglichkeiten haben aber doch ihren Reiz. Genau daher entschloss ich mich zum Bau eines Flyduspider Hexacopters, angelehnt an das Aussehen einer Spinne.
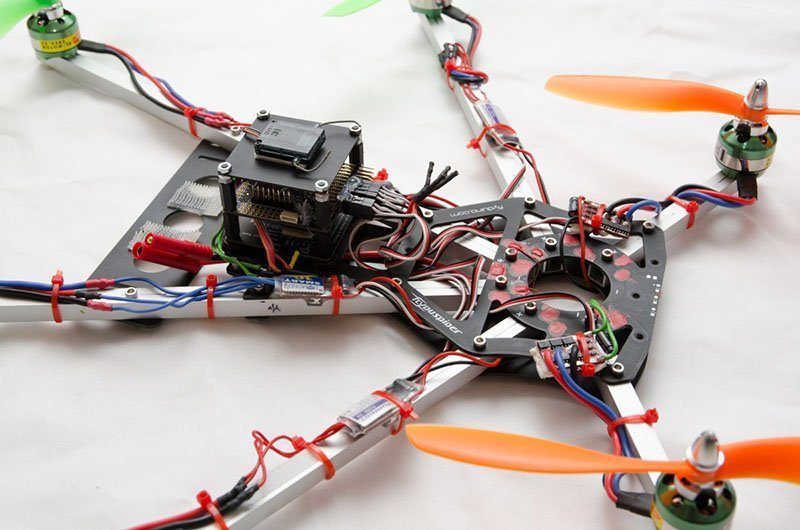
Die Flyduspider ist ein asymmetrisch angeordneter Hexacopter, der zwei kurze, zwei mittlere und zwei sehr lange Ausleger besitzt, auf denen die sechs Motoren samt Propelller montiert werden. Dadurch entsteht viel Platz zwischen den vorderen Auslegern, wodurch sich der Rahmen optimal zum FPV-Fliegen oder für Luftaufnahmen eignet.
Das war aber gar nicht meine Intention, da mein QuadX sich seit MultiWii 2.1 auch sehr gut dafür eignet. Natürlich will ich nicht ausschließen, dass ich in Zukunft hier noch aufrüsten werde.
Das Setup
Rahmen
- Flyduspider-Centerplates von Flyduino.de
- Vierkantrohr aus Aluminium*, 10 mm Kantenlänge von alfer
- Polyamidabstandshalter* für die Elektronik
- V2A M3 Zylinderkopfschrauben* und Stoppmuttern für den Rahmen
- 3M DuoLock* als Akkuhalter
- Flyduino 8×4,5 Propeller*
Elektronik
- Robbe Roxxy 2824-26 Motoren 1380 kV
- Turnigy Plush 10A ESCs
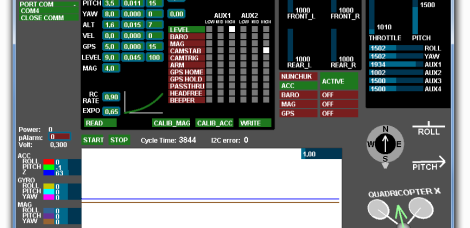
- Flyduino Mega als Flightcontroller (mit MultiWii 2.1)
- Flyduino 9-DOF-IMU als Sensor
- Spektrum Satellit als Empfänger
Das schöne war, ich konnte wieder viel von Paul Bake beziehen. Für mich als Hamburger bedeutet dies superschnelle Lieferzeiten, da der Shop nicht all zu weit entfernt ist. Zudem finde ich das Preisleistungsverhältnis dort immer noch sehr gut.

Der Aufbau
Der Aufbau der Flyduspider erforder in meinen Aufgen mindestens eine Ständerbohrmaschine*, um die Löcher in den Alumniumarmen* genau setzen zu können. Hier gibt es zwar auch die Möglichkeit direkt fertige, beschichtete Arme zu kaufen, diese sind mir aber immer zu teuer, da ich in der Lage bin die Löcher selber zu bohren.

Das Zusammensetzen an sich ist dann nur noch das Einstecken von einigen Schrauben sowie das Kontern mit entsprechenden Muttern. Der Rahmen ist in seiner Rohform dann bereits fertig, aber natürlich nackt.
Am Hinteren Ende der Centerplate habe ich zu diesem Zeitpunkt des schon bereits konfigurierten Flyduino Mega Controller samt Seonsoren und Empfänger montiert. Dabei macht es natürlich Sinn, dass die Ausgänge für die ESCs* in Flugrichtung schaune, um sich Kabelgewirr zu ersparen.
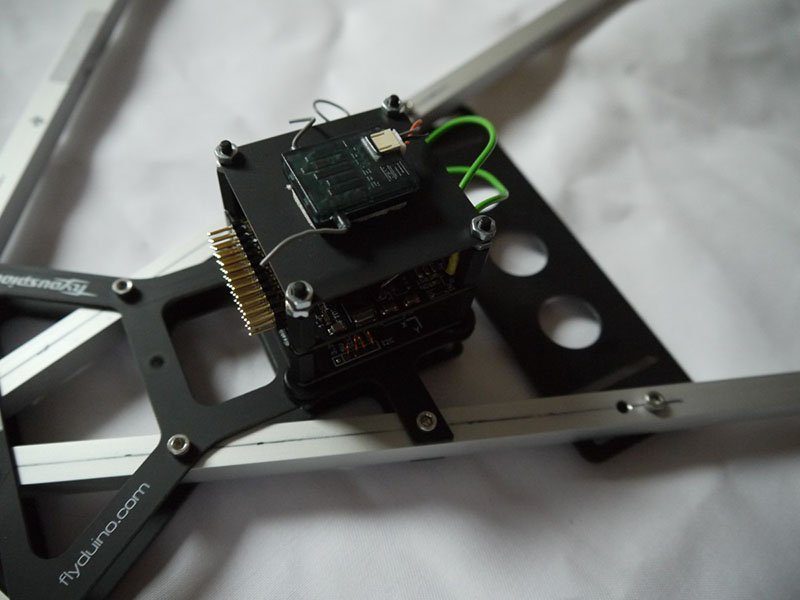
Alle ESC beziehen ihren Strom aus der unteren Centerplate, die, wie auch die obere, über eine integrierte Strom- und Spannungsverteilung verfügt. Ich habe mich für die untere Plate entschieden, da ich so die Zuführung vom Akku besser anbringen konnte. Die obere Plate wurde mit 0,5 mm Kupferlackdraht aber ebenfalls an die Spannungsversorung angeschlossen, da ich hier später SMD-LEDs* nachrüsten möchte.
Zudem bezieht der Flightcontroller so seinen Strom auf kürzestem Wege. Alle Kontaktflächen habe ich zur Sicherheit mit PlastiDip* isoliert. Auch am Flighcontroller habe ich alle Stecker zusätzlich mit Heißkleber* fixiert, damit sich im Betrieb nichts versehentlich löst und zu einem Unfall führt.
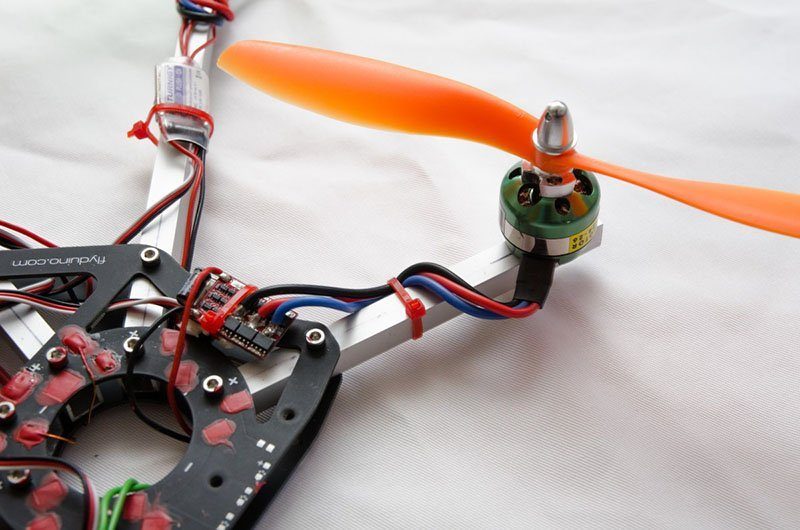
Um Gewicht zu sparen habe ich die vorderen beiden Roxxy Motoren* direkt auf die ESCs gelötet, alle anderen ESC-Motor-Paarungen wurden ebenfalls Kabel an Kabel verlötet und verschrumpft. Somit fällt die Masse der jeweils drei Goldkontaktstecker weg. Die ESC selber sind zurzeit noch provisorisch mit Kabelbindern an den Armen bzw. vorne auf der Centerplate befestigt.

Mir gefällt es optisch noch nicht wirklich, es funktioniert aber tadellos. Die Motoren selber habe ich mit M3x12 Schrauben direkt auf den Auslegern fixiert. Dabei habe ich die 19 mm Löcher gewählt, da diese mehr Halt bieten sollten.
Da ich den Hexacopter als reines Vergnügungsgefährt zum Rumheizen gebaut habe, besitzt die Flyduspider bei mir auch kein Landegestell. Daher habe ich den Akkuhalter unter den Auslegern, also auf Höhe der unteren Centerplate montiert. Somit sitzt der Lipo (ZP Lipo Serie von Dymond) nun gut geschützt zwischen den hinteren Auslegern. Zur optimalen Einstellung des Schwerpunktes kann diese Lipo-Platte dank Langlöchern entsprechend verschoben werden.
Mit der aktuellen Motorisierung an 8-Zoll-Propellern* geht das Gefährt ab wie Hölle. Am Anfang war es echt schwer für mich, die Spinne unter Kontroller zu bekommen, wenn man richtig Gas gibt. Dafür ist die Flyduspider im Schwebeflug mit aktiviertem ACC zahm wie ein Lamm. Man kann die Knüppel los lassen und es passiert nichts. Der Multicopter steht einfach in der Luft.
Der Schwebeflug mit diesem Teil ist ein absoluter Genuss. Wirklich perfekt für FPV könnte ich mir denken. Meine GoPro* habe ich allerdings noch nicht montiert. Kommt aber noch. Genauso wie ein Video vom dem guten Stück!