Wer eine Jeti Fernsteuerung sein Eigen nennt, hat sich schnell an den Komfort des genialen EX Telemetriesystems gewöhnt. Im Normalfall benötigt man spezielle Sensoren, um die Daten im Modell aufzuzeichnen und per Rückkanal an die Erde zu funken.
In diesem Artikel soll es darum gehen, wie man alle wichtigen Telemetriedaten aus CleanFlight / BetaFlight direkt per Jeti Telemetry EX Protokoll abrufen kann.
Wer mit den verschiedenen Begriffen und Technologien seiner Jeti Funke noch nicht richtig vertraut ist, dem empfehle zu aller erst ich einen Blick in den Jeti Protokoll Guide. Ziel dieser Anleitung ist es, die von CleanFlight / BetaFlight zur Verfügung gestellten Telemetriedaten, also die Daten, die direkt vom Flightcontroller bereitgestellt werden, per EX Bus Anbindung an die Fernsteuerung zu übermitteln.
Das Schöne an der Geschichte: EX Bus* ist ein digitales bidirektionales Protokoll. In der Praxis bedeutet dies, dass alle Daten über genau ein Kabel übertragen werden. An Bord des Quads hat man also nur unwesentlich mehr Kabel mit an Bord.
Inhalt
CC3D vs Naze32
Die Umsetzung unterscheidet sich im Detail zwischen dem CC3D* und dem Naze32 Flight Controller*. Ich werde auf beide FCs eingehen, so ist wohl den meisten Leuten geholfen. :) Welchen Controller ihr nutzt ist in Bezug auf die Telemetrieübertragung nicht von Bedeutung.
Der Flashvorgang der BetaFlight Firmware ist jedoch für das CC3D Board mit mehr Umstand verbunden. Wie genau das funktioniert, habe ich euch bereits erklärt. Die Flash-Anleitung gilt in gleicher Weise für BetaFlight und die BetaFlight Configurator App im Chrome Browser.
Vorbereitung
Bevor es los geht sind nur wenige Dinge zu besorgen. Im Falle des CC3D Controllers* benötigt ihr ein passendes Kabel für den Flexi-Port des Boards. Für die meisten Naze32-Varianten ist dies nicht nötig, da hier direkt auf das Board gelötet werden kann. Zusätzlich ist ein 2,2 kOhm Widerstand* notwendig.
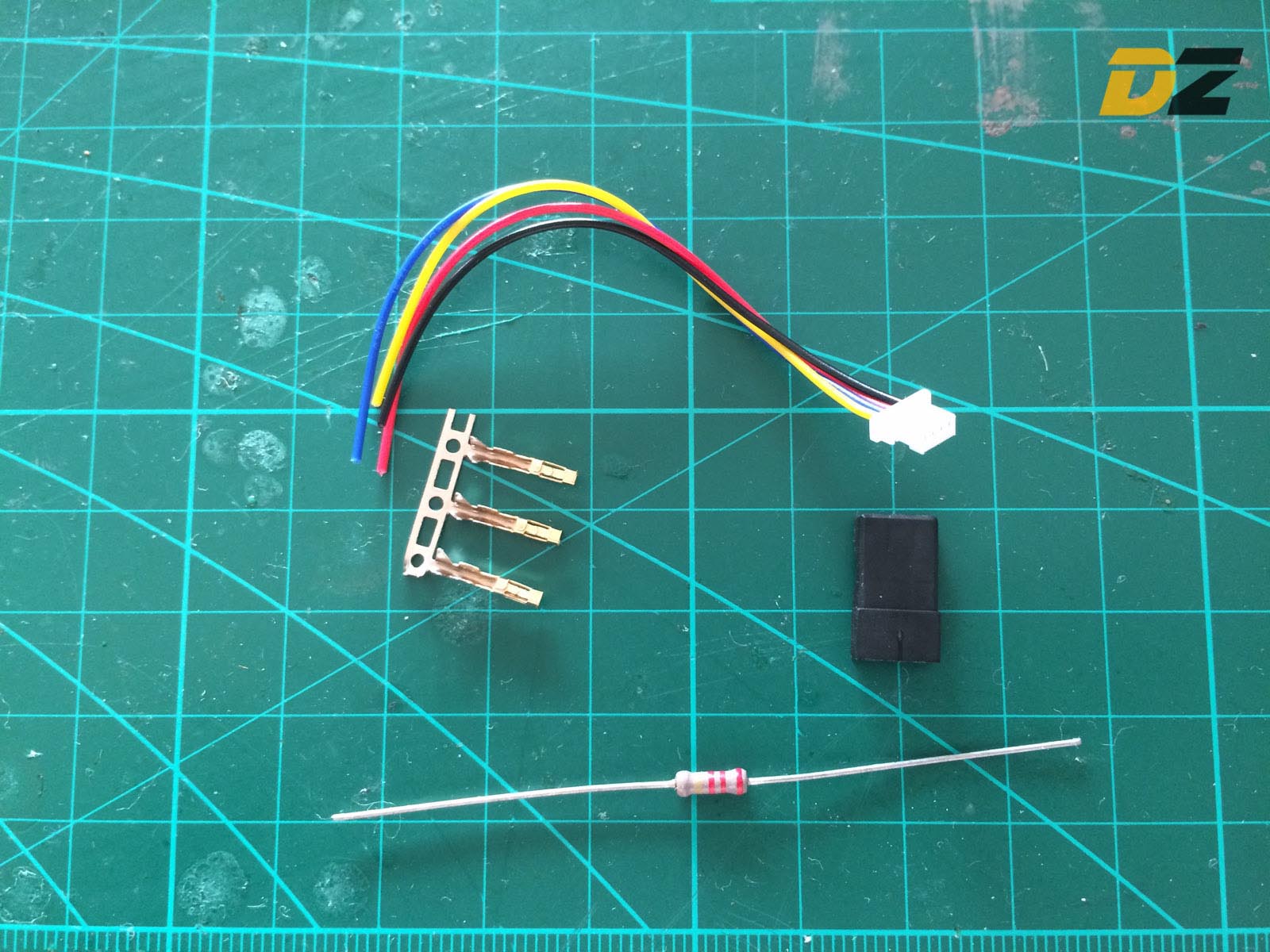
Hier bietet sich ein Widerstand mit 1% Toleranz in Standardbauform an. SMD-Widerstände sind in diesem Fall nur unnötiger Aufwand.
Flightcontroller EX Bus fähig machen
Für beide Boards gilt im Endeffekt dasselbe. Damit das Ex Bus Protokoll samt EX Telemetrie genutzt werden kann, muss der oben erwähnt Widerstand zwischen RX und TX des gewählten UARTs* gelötet werden. Nur dann ist der Controller in der Lage nicht nur Signale vom Empfänger entgegen zu nehmen, sondern auch Daten über den Rückkanal an den Empfänger zu senden.
Welche Serial-Ports in Frage kommen, ist vom verwendeten Flightcontroller abhängig. Im Folgenden soll die Vorgehensweise deshalb Schritt für Schritt für CC3D und Naze32 erklärt werden.
Jeti EX Bus Empfänger kaufen!*
CC3D
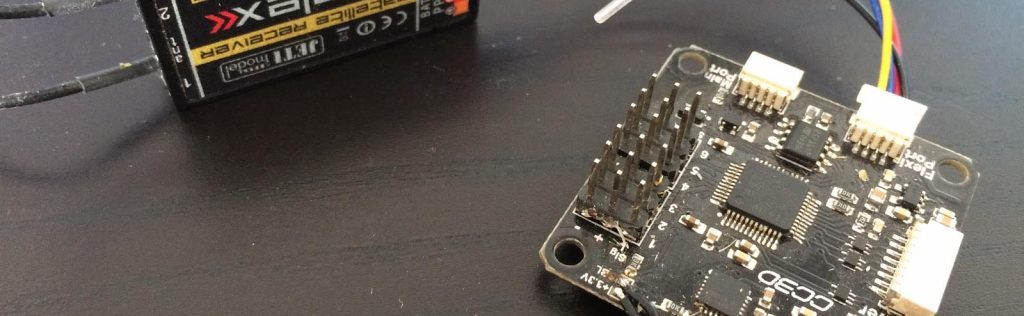
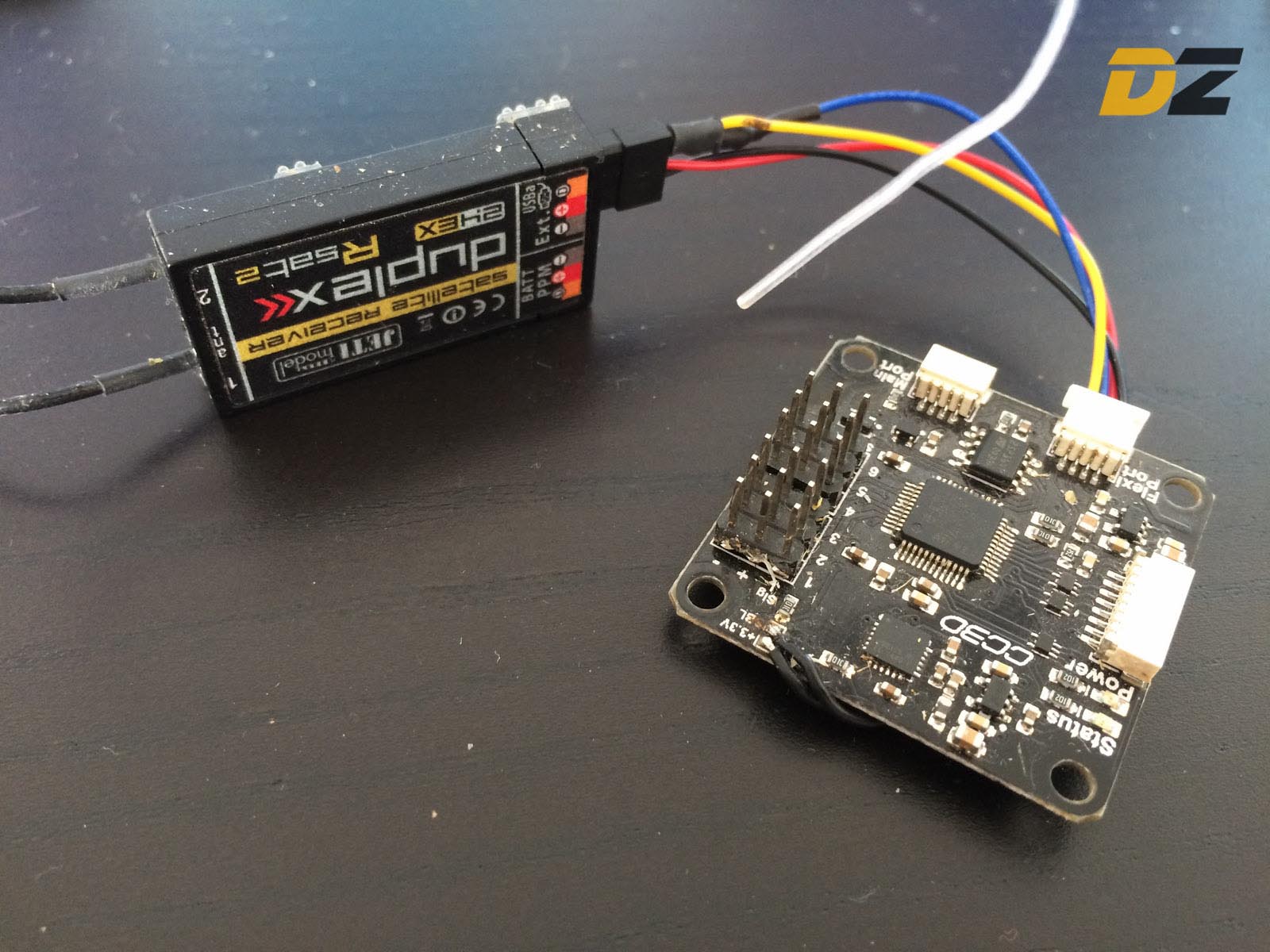
Der CC3D Controller stellt genau ein hardwarebasiertes UART* für die Verbindung von seriellen Empfängern bereit. In BetaFlight wird dies mit UART3 bezeichnet. Gemeint sind damit die seriellen Ein- und Ausgänge des FLEXI-Ports (NICHT Main-Port). Der Port stellt Spannung, GND sowie seriell RX und TX zur Verfügung.
Achtung: Die Spannung ist nicht geregelt und entspricht der Eingangsspannung des CC3D-Boards*. Soll der Empfänger über den Flexi-Port mit Spannung versorgt werden, unbedingt einen Spannungswandler benutzen, um nicht den Empfänger zu zerstören.
Nun ist es an der Zeit ein Adapterkabel zwischen Flexi-Port und unserem Jeti-Empfänger zu basteln. Dabei soll uns ein Jeti RSAT2* als Beispiel dienen. Alle aktuellen Jeti Empfänger können jedoch über den EXT-Port EX Bus ausgeben.
Hinweis: Die genannten Kabelfarben des Flexi-Portkabels können je nach CC3D-Board und dessen Lieferumfang abweichen!
Schritt 1: VCC (rot, Pin 2) und GND (schwarz, Pin 1) am FlexiPort mit VCC und GND am RSAT-Empfänger verbinden. Hierzu eignet sich natürlich das Krimpen eines Servosteckers.
Schritt 2: Der RX-Eingang (gelb, Pin 4) des Flexi-Ports wird direkt mit dem Signal des RSAT2 verbunden (bzw. dem entsprechenden Platz im Servostecker).
Schritt 3: Ebenfalls wird die eine Seite des 2,2 kOhm Widerstandes direkt mit dem Signalstecker verbunden. Die Polung des Widerstands ist dabei unerheblich, du kannst also eine beliebige Seite verwenden.
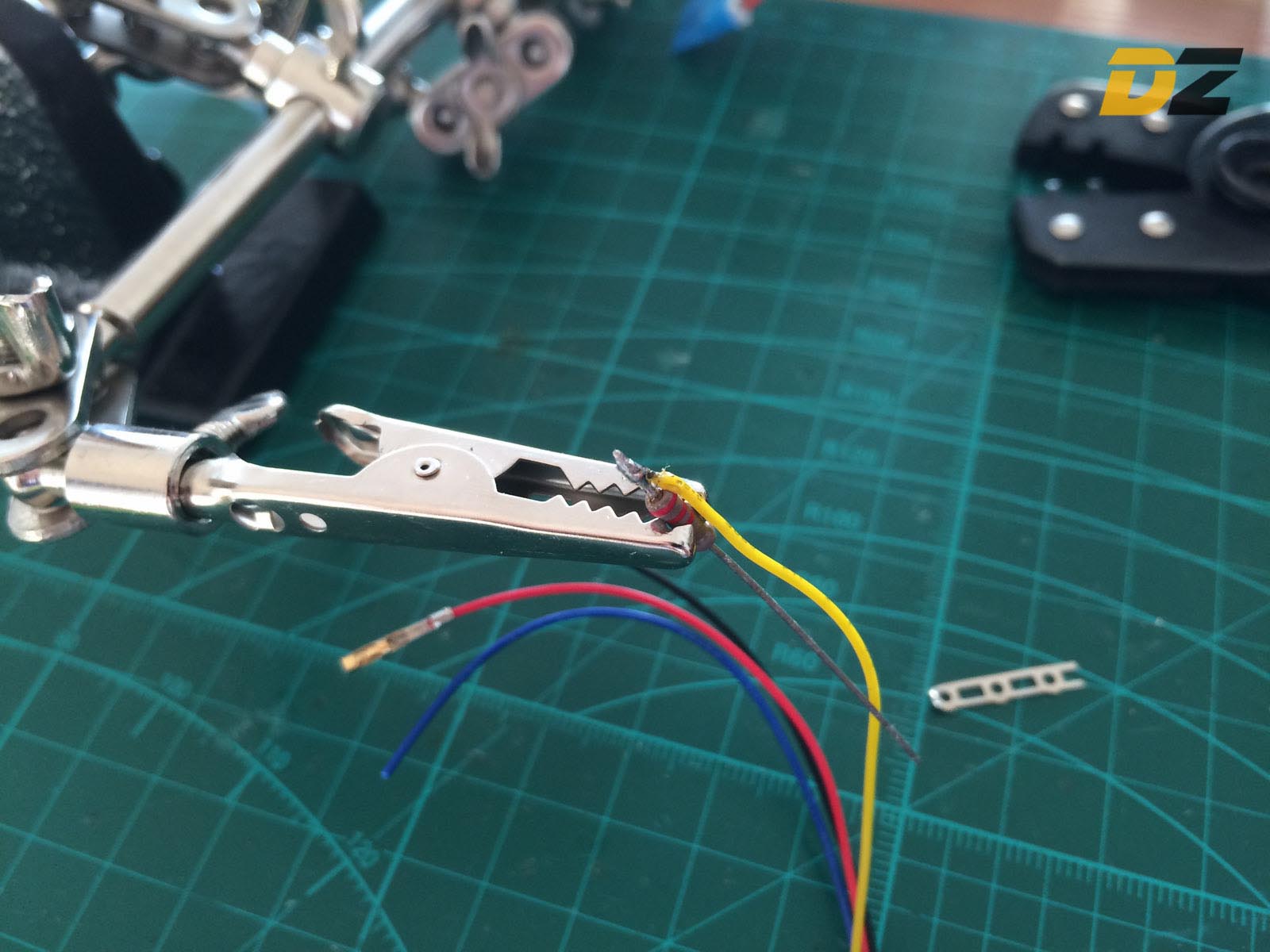
Schritt 4: Mit dem anderen Endes des Widerstands wird das TX-Signal des Flexi-Ports (blau, Pin 3) verbunden.
Schritt 5: Danach alles schön mit Schrumpfschlauch isolieren und verbinden.
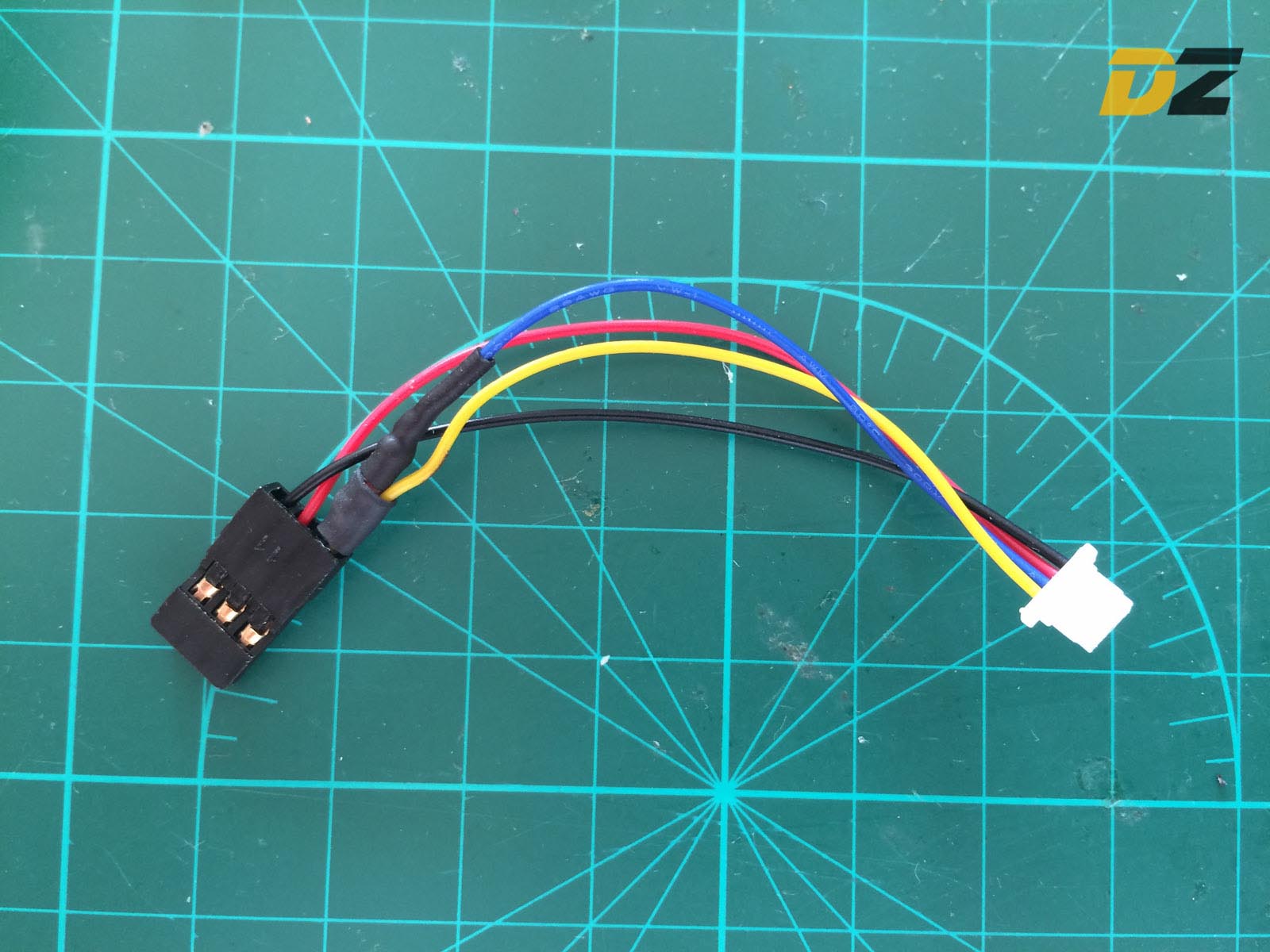
Schritt 6: WICHTIG: Die Verbindung am RSAT2* erfolgt nun über den EXT-Port, nicht mehr über den PPM-Port!
Naze32
Bei der Naze32 FC* geht der Vorgang noch schneller. Als Beispiel dient hier eine Afro Naze32 Acro Rev. 6. Anstatt aufwändig einen Adapter zu bauen, hat das Bord den großen Vorteil, dass die entsprechenden Kabel einfach direkt angelötet werden können.
Das Einzige was also benötigt wird ist unser 2,2 kOhm Widerstand*. Die Naze32 zeigt uns in CleanFlight ebenfalls ein extra UART mit dem Namen UART2 an, welches wir für die Verbindung des Jeti Empfängers nutzen wollen.
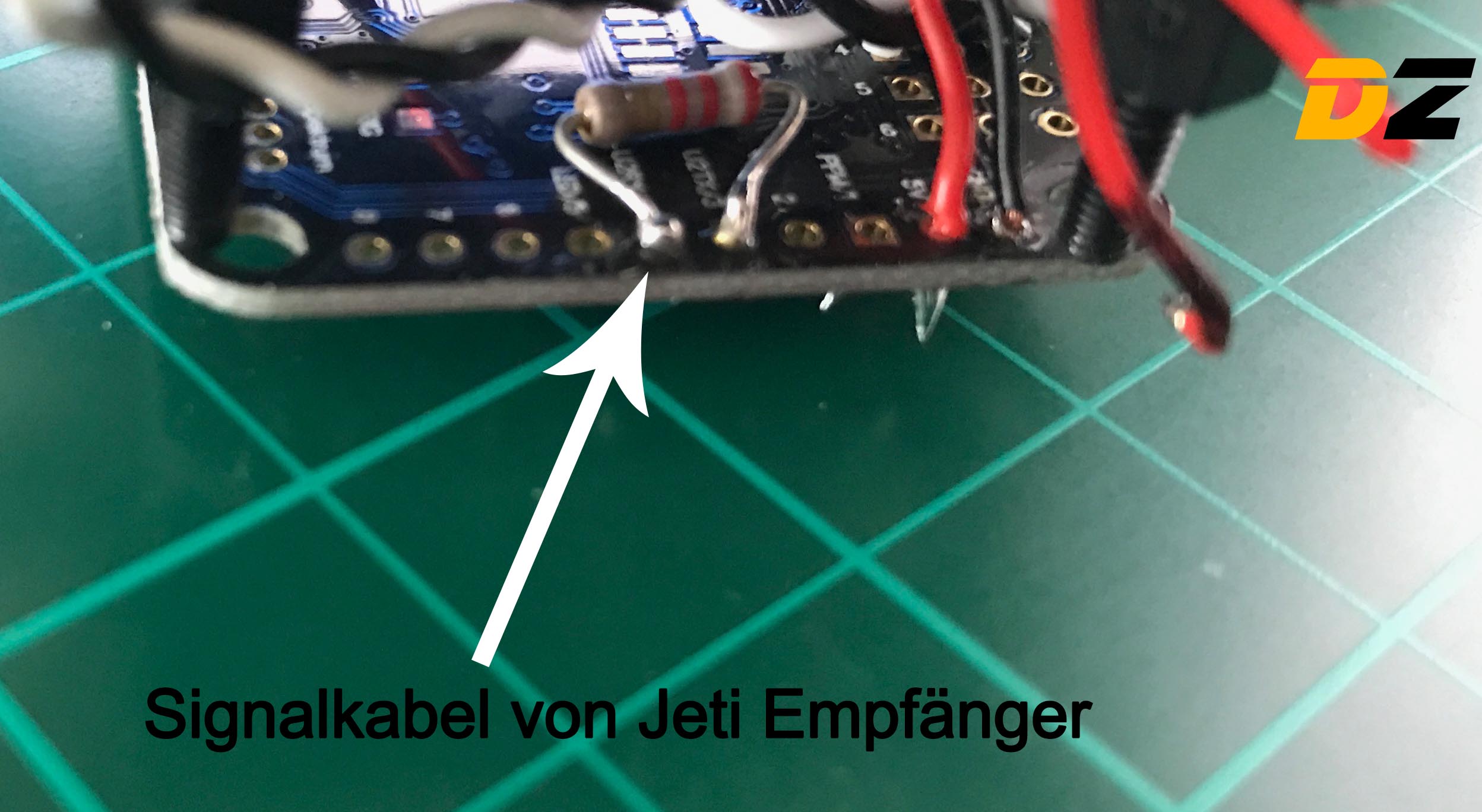
Schritt 1: Je nach Naze32 Board müssen zuerst die Anschlüsse des UART2 identifiziert werden. Im vorliegenden Fall sind dies Pin 3 (TX) und Pin 4 (RX) an der seitlichen Anschlussleiste des Boards.
Schritt 2: Anschließend wird der Widerstand zwischen Pin 3 und Pin 4 gelötet.
Schritt 3: Der Anschluss des vom Empfänger kommenden Signalkabels wird nun ebenfalls mit dem RX-Pin (4) verbunden.
Schritt 4: Der Widerstand lässt sich relativ kompakt auf der Unterseite der Naze32* verstauen.
Schritt 5: Je nach Board befindet sich an derselben Anschlussleiste ebenfalls der Spannungseingang für die FC. Hier kann ganz einfach ebenfalls die Spannung für den Empfänger abgegriffen werden. Erneut Vorsicht: Die FC hat keinen Spannungswandler. Die Akkuspannung muss also vorab heruntergeregelt werden!
Schritt 6: Fertig. :)
Flight Controller für Betaflight ansehen*
BetaFlight Konfiguration
Aktuell ist das EX Bus Protokoll nur in Beta Flight implementiert. Die Vergangenheit hat aber gezeigt, dass eine Integration stabiler Funktionen auch irgendwann in CleanFlight erfolgt. Für die grundsätzliche Konfiguration ist der Unterschied allerdings zweitrangig.
Schritt 1: FC mit dem Rechner verbinden. Aktuellste Stable-Version von BetaFlight ist aufgespielt. BetaFlight Configurator App ist auf dem neusten Stand und mit der FC verbunden.
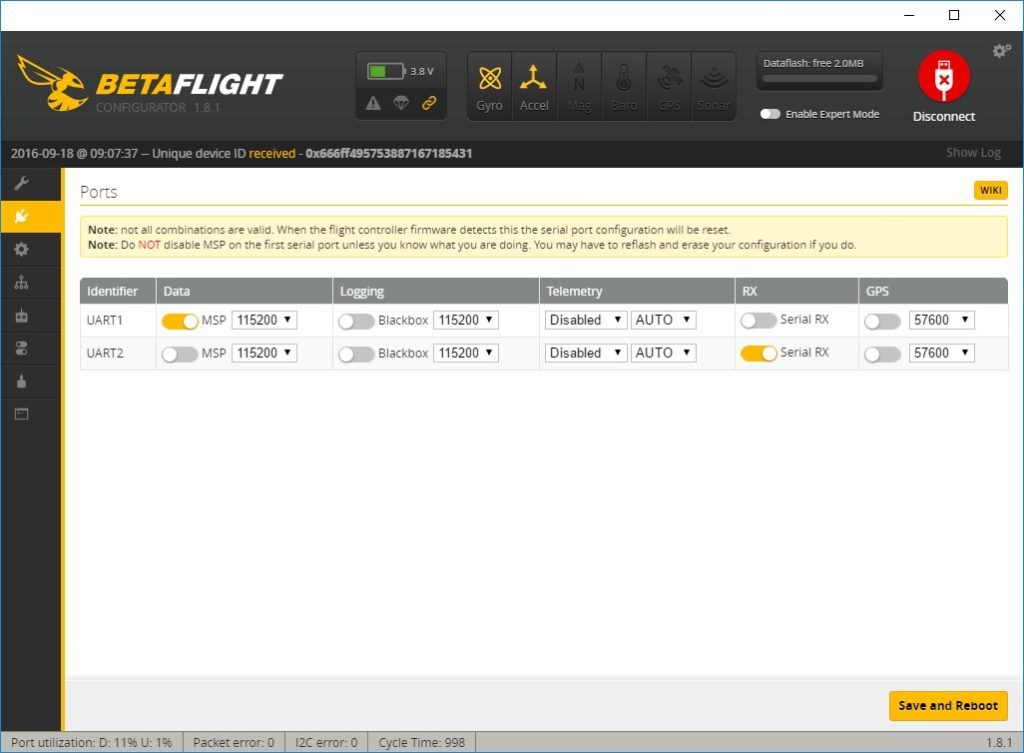
Schritt 2: In den „Ports“ Reiter wechseln.
- CC3D: UART3 in der Spalte RX den Schalter Serial RX aktivieren. Speichern und Bord neustarten lassen.
- NAZE32: UART2 in der Spalte RX den Schalter Serial RX aktivieren. Speichern und Bord neustarten lassen.
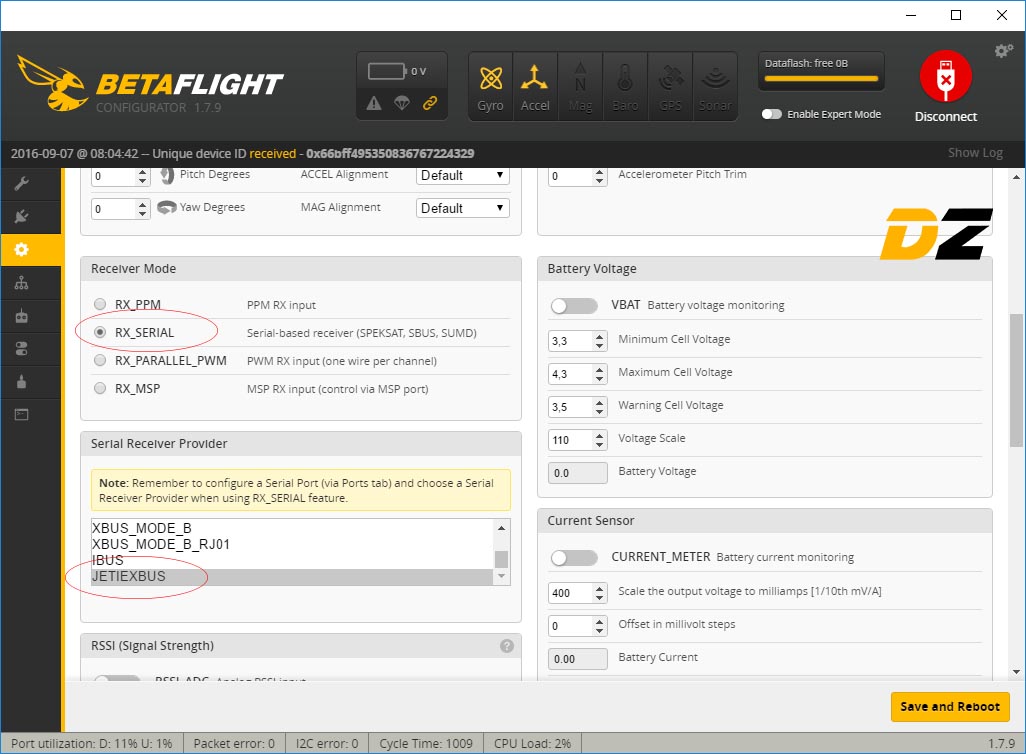
Schritt 3: Danach in den Reiter „Configuration“ wechseln.
Schritt 4: Unter „Receiver Mode“ den Modus RX_Serial wählen.
Schritt 5: In der Auswahl „Serial Receiver Provider“ ganz nach unten scrollen und JETIEXBUS wählen.
Schritt 6: Im letzten Schritt ganz nach unten Scrollen und im Bereich „Other Features“ den Schalter für Telemetry aktivieren.
Schritt 7: Speichern und neustarten.
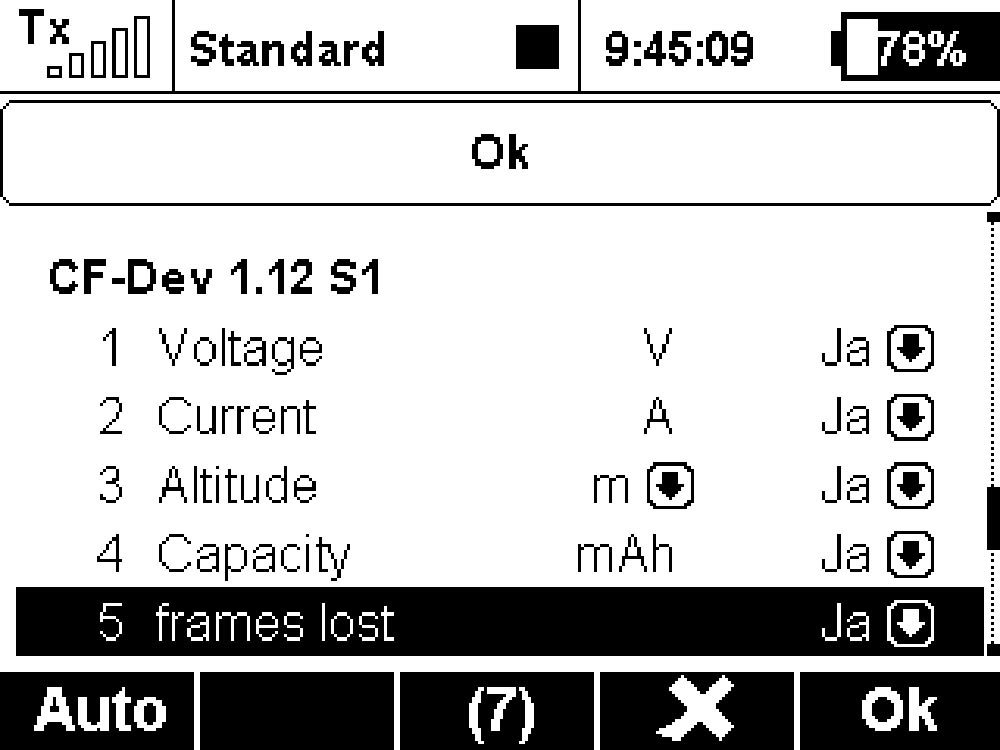
Versorgt man die FC und den Empfänger nun mit Spannung und trennt die USB-Verbindung*, so sollten erste Telemetriewerte übertragen werden. Dazu einfach auf der Jeti Fernsteuerung* nach Hautpmenü -> Stoppuhren/Sensoren -> Sensoren/Aufzeichnung navigieren und einen Moment abwarten.
Alternativ kann auch die Auto-Taste gedrückt werden. Bisherige Sensoren werden dabei aber für das gewählte Modell verworfen. Hat alles geklappt, werden alle Telemetriedaten von Cleanflight gelistet und können wie jeder andere Jeti-Sensor behandelt werden.
Funktioniert das nicht, arbeitet der Empfänger vielleicht noch im falschen Modus. Dazu in die Geräteübersicht der JETI DS-14*/DS-16 wechseln und das Ausgabeprotokoll des Empfängers auf EX BUS / PPM wechseln. Stellt außerdem sicher, dass ihr die aktuellste FW für euren Jeti Empfänger installiert habt.
Jeti DS-14 Sender auf Amazon ansehen!*
Sensordaten sammeln
Letztes Puzzelteil ist die Erfassung von Daten, wie Spannung und Strom mithilfe der FC. Für die meisten wird wohl die Akkuspannung am wichtigsten sein. Hierzu muss im Configuration-Reiter noch die Funktion VBAT aktiviert werden. An die NAZE32* kann direkt die Spannung des Akkus bis 4S an die vorgesehenen VBAT-Pins angeschlossen werden.
Ein Vorwiderstand ist hier in der Regel bereits integriert. Mit einem Multimeter misst man zuerst die Leerlaufspannung des Akkus. Danach wird der Wert Voltage Scale unter dem Punkt VBAT so verändert (Neustart erforderlich) bis die Akkuspannung in der oberen Menüzeile des Konfigurators der gemessenen Akkuspannung möglichst genau entspricht.
Im Falle des CC3D* ist der Bau eines Spannungsteilers notwendig. Die Akkuspannung muss als von 16,8 V auf einen maximal (!!!) 3,5-V-Pegel abgesenkt werden. Rechner dazu finden sich im Netz. Angeschlossen wird VBAT am CC3D über den ReceiverPort (8 Pin Anschluss). Pin 1 ist zumeist GROUND, das VBAT-Signal wird Pin 7 zugeführt. Eine Referenz der genauen Pin-Belegung des CC3D findet sich im alten OpenPilot Wiki.

Hallo, danke für diese Anleitung. Kannst Du eine Bezugsquelle für den passenden Widerstand nennen. Ich habe zwar welche bei Amazon gefunden, aber die Farbcodierung dort auf dem Bild passt nicht zu Deinen Bildern (vielleicht ist auch nur das Bild bei Amazon falsch): https://amzn.to/2XPFqVS*
Hi Heiko,
ich würde für solche Bauteile mal bei Reichert oder Pollin gucken. eBay ist für Kleinstmengen auch immer gut aufgrund des oftmals günstigen Versands. So lange aber der Wert stimmt, kann das Produktfoto sicherlich abweichen (wie im Fall von Amazon). Da würde ich es glaube ich drauf ankommen lassen, wird schon das richtige geliefert werden :)
Grüße!
Danke, ich habe jetzt mal Widerstände bei Ebay geordert. Ich habe hier mehrere SP3 mit RSat2 Ex und war bisher mit SBUS Firmware unterwegs. EXBUS ist natürlich wegen der Telemetrie interessant. Welche Werte werden eigentlich angezeigt ? Alle auf Deinem Bild, oder noch mehr ?
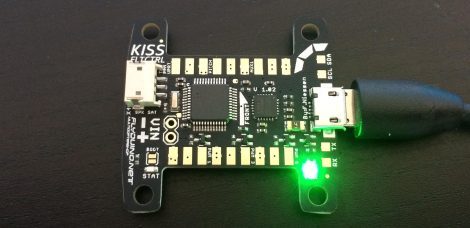
Ich habe eben mal einen SP3 mit Betaflight 3.0.1 und einen RSAT2 über EXBUS angeschlossen, über den seitlichen Eingang, funktionierte sofort, aber wie/wo müsste man beim SP3 den Widerstand verbauen ? Ich hatte für den kurzen Test den IO2 benutzt(keine Telemetrie-da noch kein Widerstand)
Hier mal der Anschlussplan(kommt von einem anderem Block)
http://blog.seidel-philipp.de/sp-racing-f3-flight-controller-pinlayout-und-anschlussplan/
Wie sollte man hier vorgehen ?
Was genau meinst du mit seitlichem Eingang? Ich denke man müsste hier ebenfalls über eines der verfügbaren UARTs gehen und dann entsprechend die Einstellungen in Cleanflight anpassen. Widerstand geht dann sicherlich genau so zwischen RX und TX, wie beim Naze / CC3D. Probiert habe ich es aber noch nicht, da ich kein SP3 Board fliege :)
mit dem seitlichen Eingang meine ich den IO2(auf dem Bild linke Abbildung auf der rechten Seite). Schau mal in das Pinout was ich verlinkt habe. Dort habe ich bisher auch SBUS angeschlossen, funktioniert aber auch mit EXBus.
Habe das ganze bei einem SP Racing F3 Board nachgebaut, bei UART3 geht alles auf anhieb !
Vielen Dank für die Anleitung, SUPER !!!!
Hallo Nils,
Ich habe ein Problem, hoffe Du kannst mir helfen:
Ich habe ein Naze32 Board für meinen Quad und würde gerne die EX Telemetriefunktion nutzen, besitze eine JETI DC-16.
Widerstand ist eingelötet, Signalkabel auf Pin4. Im Betaflight Konfigurator, im Reiter Configuration wähle ich Serial based receiver an, kann aber bei Serial Receiver Provider keinen JETIEXBUS einstellen. Nach jedem „Save and Reboot“ erscheint wieder SPEKTRUM1024.
Was muss ich tun? Kannst Du mir bitte weiterhelfen?
Vielen Dank vorab
Grüße
Uli
Hallo Uli,
das ist in der Tat komisch. Welche Revision vom Naze32 Board nutzt du?
Grüße.
Nils
Hello Nils,
I have problem how to connect receiver Jeti Rsat2 with Mamba f405 mkII.
Could you help me? Maybe some diagram or manual…
Regards
Marcin
Hi Marcin,
you can use any free UART (RX/TX) port you like to connect the receiver. Looks like RX3/TX3 are available for use on your board. Just set everything up as described in the article (try to use Google translator) and set your RSAT to EXBus mode (see Jeti receiver manual how to do that).
The connections should be the same as shown above. In almost every case you still will need to insert the resistor between RX and TX.
Hope that helps. Don’t hesitate to ask further! :)
Best,
Nils
Thanks for your answer and help. I will translate article but could you tell me where soldering exactly resistor? I am little confused… about this.
Best,
Marcin