
Aktuelle Enterprise-Drohnen sind mit einer Vielzahl an unterschiedlichen Missionstypen für verschiedene Anwendungsfälle ausgestattet. Wir erklären die wichtigsten Arten von Flugmission am Beispiel der Autel EVO Max 4T Enterprise-Drohne.
Wer heute ein Enterprise-UAV kauft, bekommt einen Haufen nützlicher Werkzeuge direkt an die Hand. Kartierung eines bestimmten Gebietes? Abfliegen eines Flusslaufes? Planung von Flugrouten in 3D? All das sind Dinge, die moderne UAV-Plattformen häufig mit wenigen Klicks beinahe vollautomatisch erledigen können.
Auch Autel hat bei der Entwicklung seiner neuen EVO Max 4T Plattform eine ganze Reihe intelligenter Funktionen integriert, um unterschiedliche Arten von Missionen möglichst zeiteffizient und nutzerfreundlich erledigen zu können. Wir geben euch einen kurzen Überblick.
Inhalt
Autel EVO Max 4T: Verschiedene Missionsarten erklärt
Damit eine Drohne möglichst einfach im professionellen Kontext verwendet werden kann, um somit Zeit und Geld gegenüber konventionellen Methoden der Auftragserledigung zu sparen, integrierten die UAV-Hersteller standardmäßig intelligente Flugprogramme.
Diese sind auf die Erledigung eines spezifischen Aufgabenbereiches fokussiert und werden häufig als Missionstyp oder Missionsart bezeichnet. Im Englischen wird auch der Begriff Mission Type verwendet. Im Folgenden gehen wir auf die entsprechenden Typen ein, die Autel bei der EVO Max 4T mitliefert (oder für kommenden Updates angekündigt hat).
Für die Veranschaulichung haben wir auf Bildmaterial von Autel Robotics zurückgegriffen.
Rechteck-Missionen
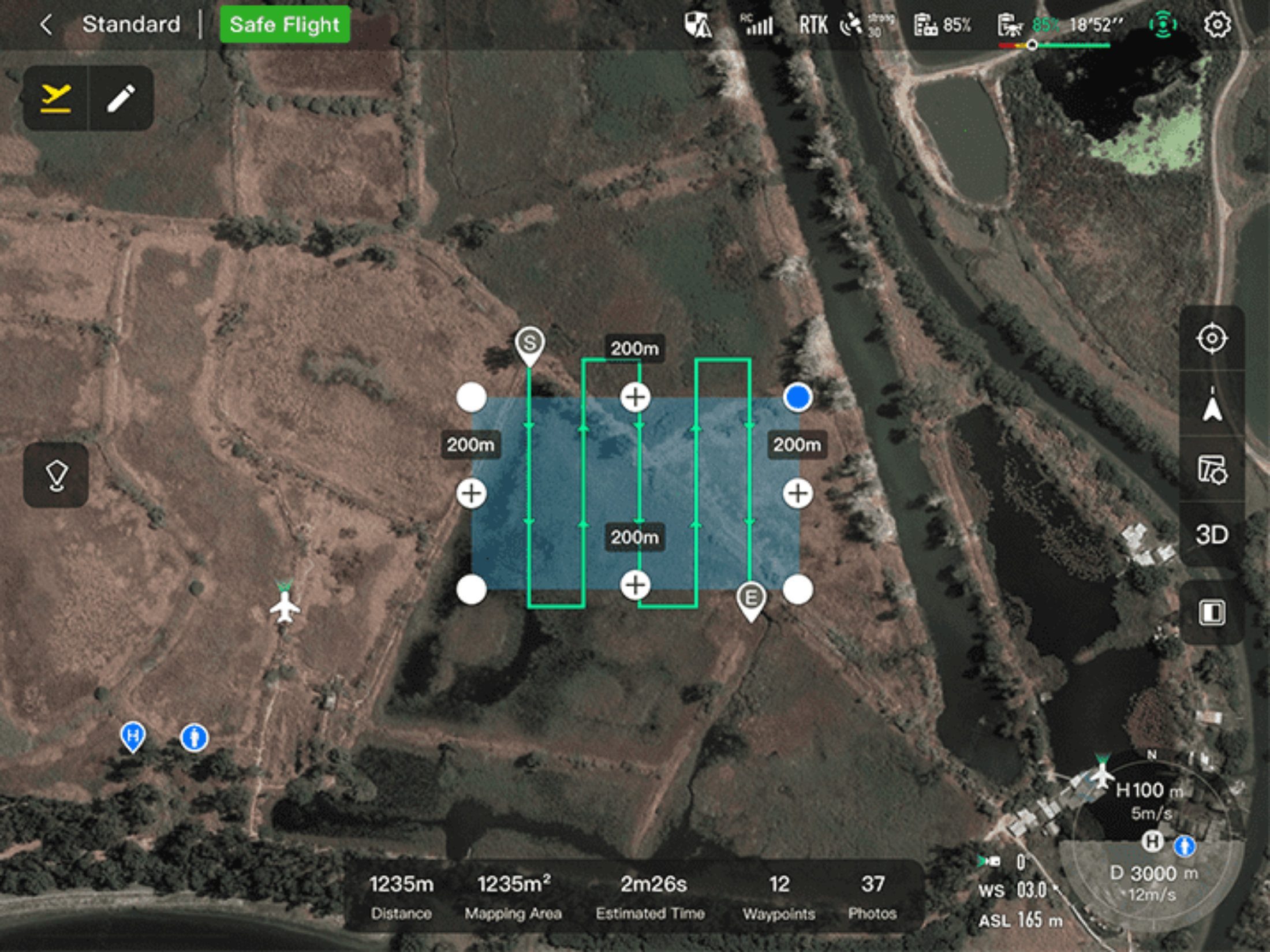
Die Reckteck-Vorlage ist die einfachste Art und Weise automatische Flugpfade zu planen. Auf der Karte wird dazu ein Bereich ausgewählt und mit einem rechteckigen Bereich markiert. Die Software plant dann den entsprechenden Pfad, den die Drohne für eine Abdeckung des Gebietes abfliegt.
Das Rechteck lässt sich dabei in seinen Kantenlängen und auch in seiner Drehung relativ zur Kartenansicht frei anpassen.
 Bildquelle: Autel Robotics | ©
Bildquelle: Autel Robotics | ©Polygon-Mission
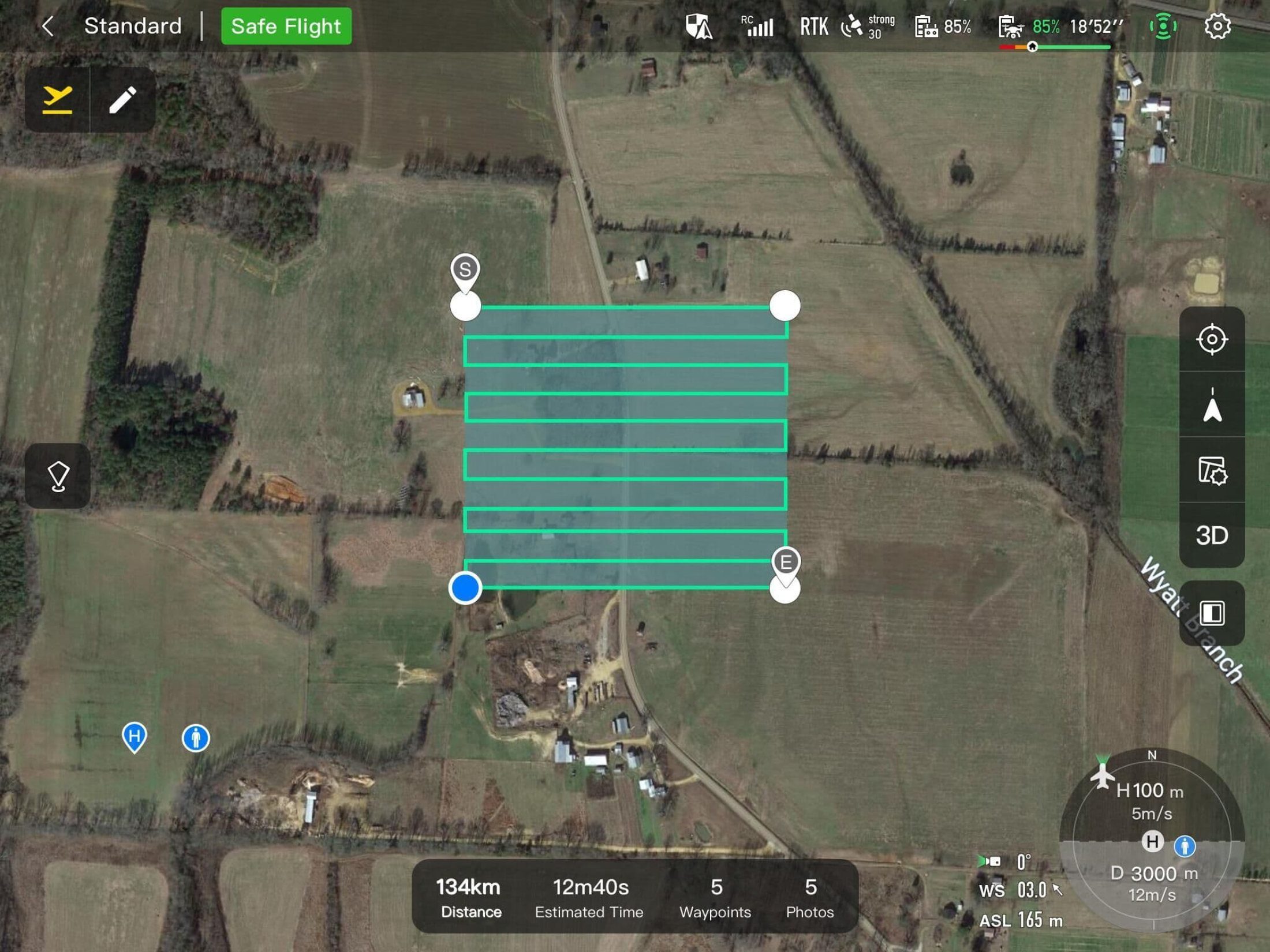
Die Polygon-Mission funktioniert im Grunde genauso wie die Rechteckvorlage. Initial wird auch hier immer ein Viereck angezeigt, sodass sich mit beiden Tools identische Routen planen lassen.
Die Besonderheit beim Polygon-Tool ist jedoch, dass sich weitere Eckpunkte hinzufügen lassen, um beispielsweise auch anders geformte Gebiete zu erfassen. Die Planung des Flugpfades geschieht auch hier so, dass der gesamte Bereich abgedeckt wird.
 Bildquelle: Autel Robotics | ©
Bildquelle: Autel Robotics | ©Terrain-Follow (Geländeverfolgung)
Bei aktivierte Geländeverfolgung nimmt das UAV eine Referenzhöhe als Grundlage und hält diese immer relativ zum Grund unter sich. Sie passt sich also bei Änderung in der Höhe des Geländes automatisch in der Flughöhe an, sodass der Abstand zwischen Drohne und Boden immer möglichst konstant ist.
Dieses Feature ist etwa für die Erstellung konstanter Aufnahmen für Kartorafieaufgaben interessant, ohne dass der Pilot die Höhe manuell korrigieren muss.
 Bildquelle: Autel Robotics | ©
Bildquelle: Autel Robotics | ©Automatische Missions- und Datengenerierung
Die automatische Missionsgenerierung ist ein allgemeines Feature, welches auf dem Setzen einfacher Eckpunkte („Grenzen“) für eine Region basiert. Den Rest übernimmt dann die EVO Max 4T.
Alternativ können neben manuell gesetzten Punkten auch konkrete geografische Gebiete auf Basis einer importierten KML-Datei verwendet werden und als Grundlage für die automatisierte Planung herangezogen werden.
 Bildquelle: Autel Robotics | ©
Bildquelle: Autel Robotics | ©Waypoint-Flug
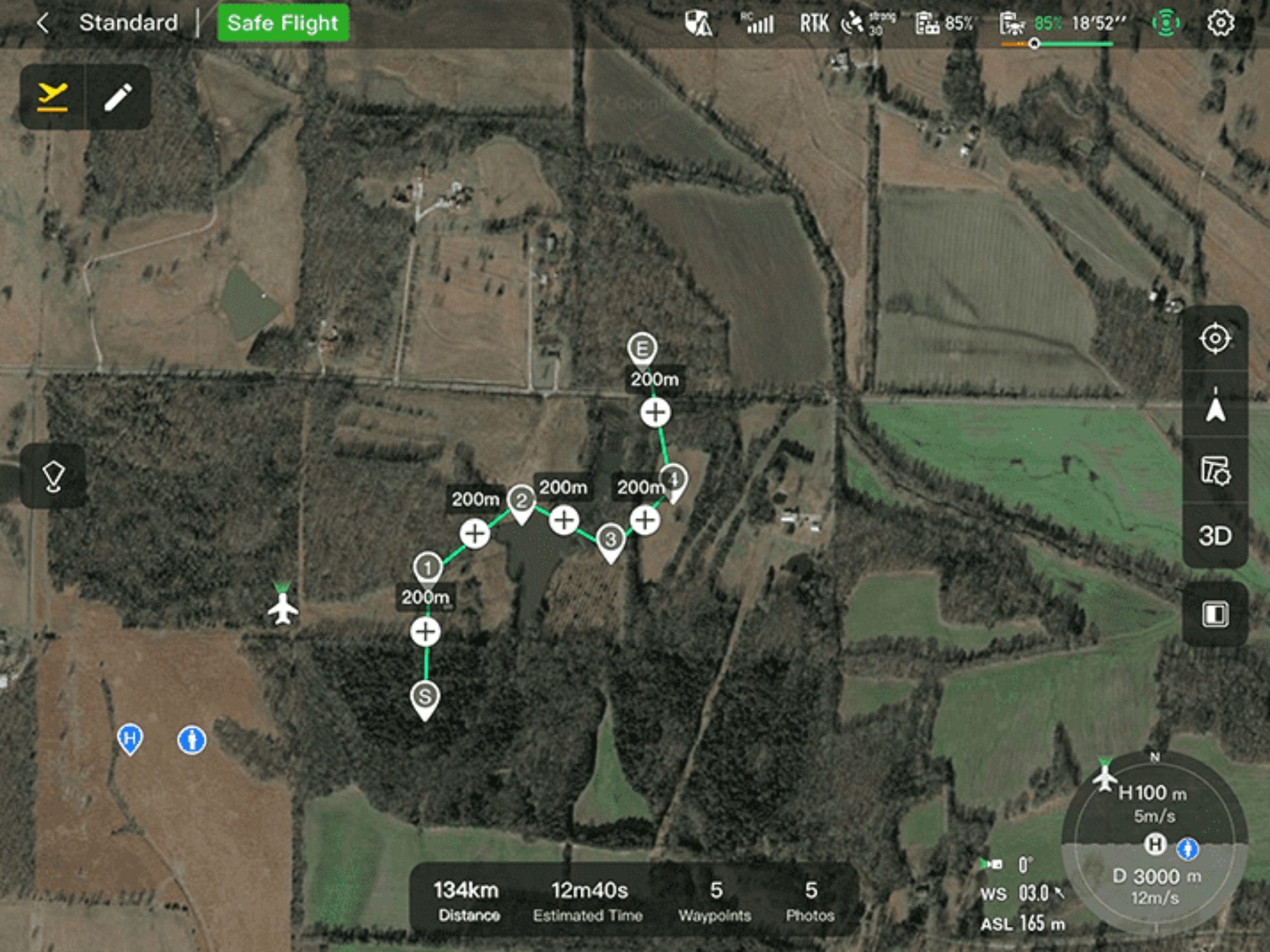
Der Waypoint-Modus ermöglicht das klassische manuelle Planen einer Flugroute entlang von spezifisch gesetzten Punkte auf der Karte. Die Drohne fliegt diesen Pfad dann ab und kann an bestimmten Punkte unterschiedliche Aktionen durchführen (z.B. ein Foto aufnehmen).
Der Waypoint-Modus kann beispielsweise auch in 3D zur Planung genutzt werden (siehe unten).
 Bildquelle: Autel Robotics | ©
Bildquelle: Autel Robotics | ©Schrägbildfotografie-Missionen (Oblique Capture)
Zur Erhebung von Daten zur Rekonstruktion von 3D-Modellen unterstützt die EVO Max 4T auch einen Modus zur Planung und Durchführung von Oblique-Missionen. Dabei werden fünf unabhängig Routen für ein ausgewähltes Gebiet geplant, sodass die Drohne von jeder Stelle vier Schrägbilder und ein Bild aus der Draufsicht erstellen kann.
Aus diesen Fotos lässt sich dann mit spezialisierter Software ein 3D-Modell des Gebietes erstellen.
 Bildquelle: Autel Robotics | ©
Bildquelle: Autel Robotics | ©Spiral-Missions
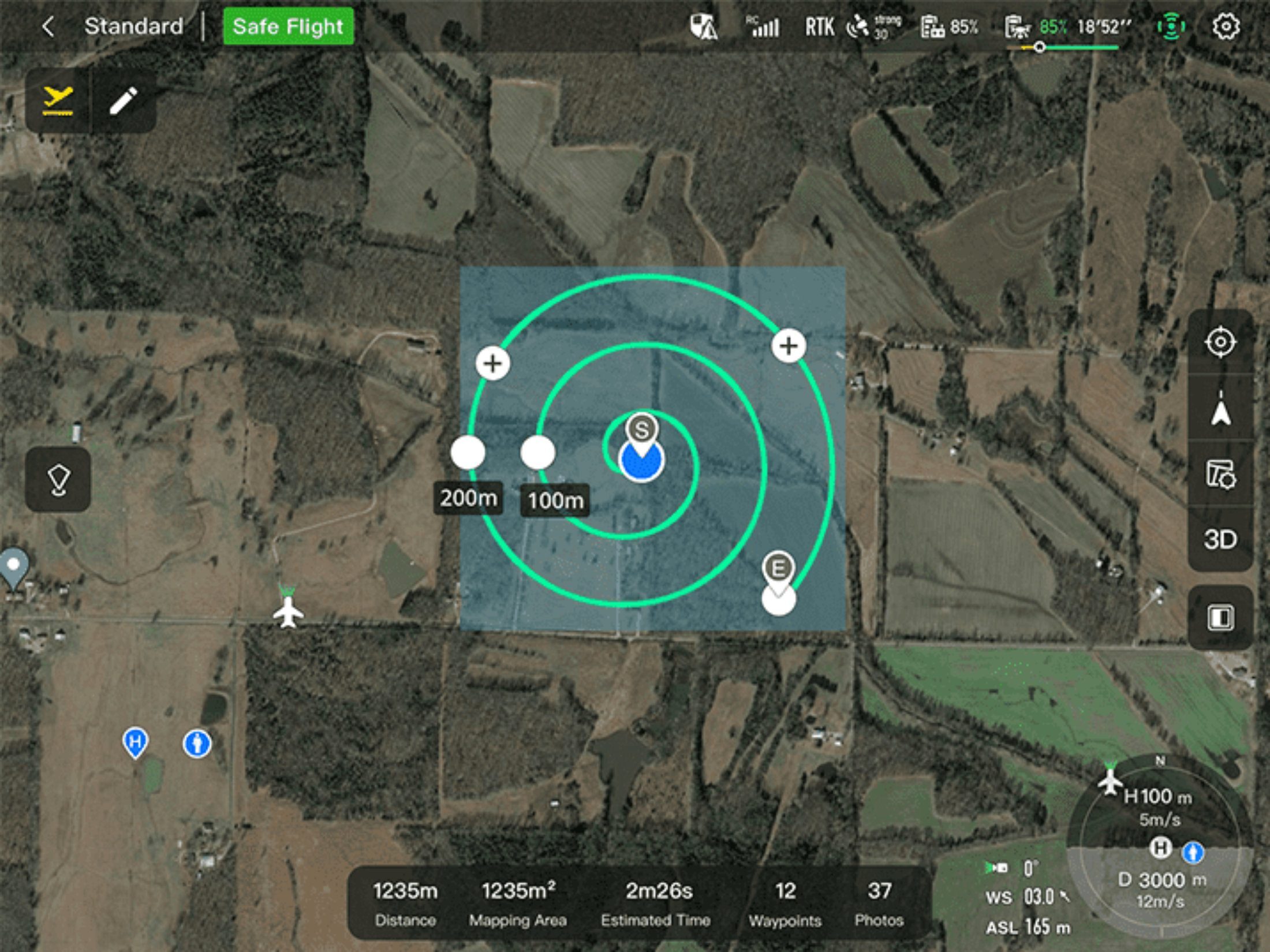
Neben klassischen rechteckigen Fluggebieten, erlaubt es Autel seiner Drohne ein Gebiet auch von einem zentralen Ausgangspunkt aus abzufliegen. Dazu wird die Startkoordinate gesetzt und die Software plant einen spiralförmigen Flugpfad um diesen Punkt. Entlang des Pfades lassen sich Aktionen platzieren, die das UAV auf dem Weg erledigt.
 Bildquelle: Autel Robotics | ©
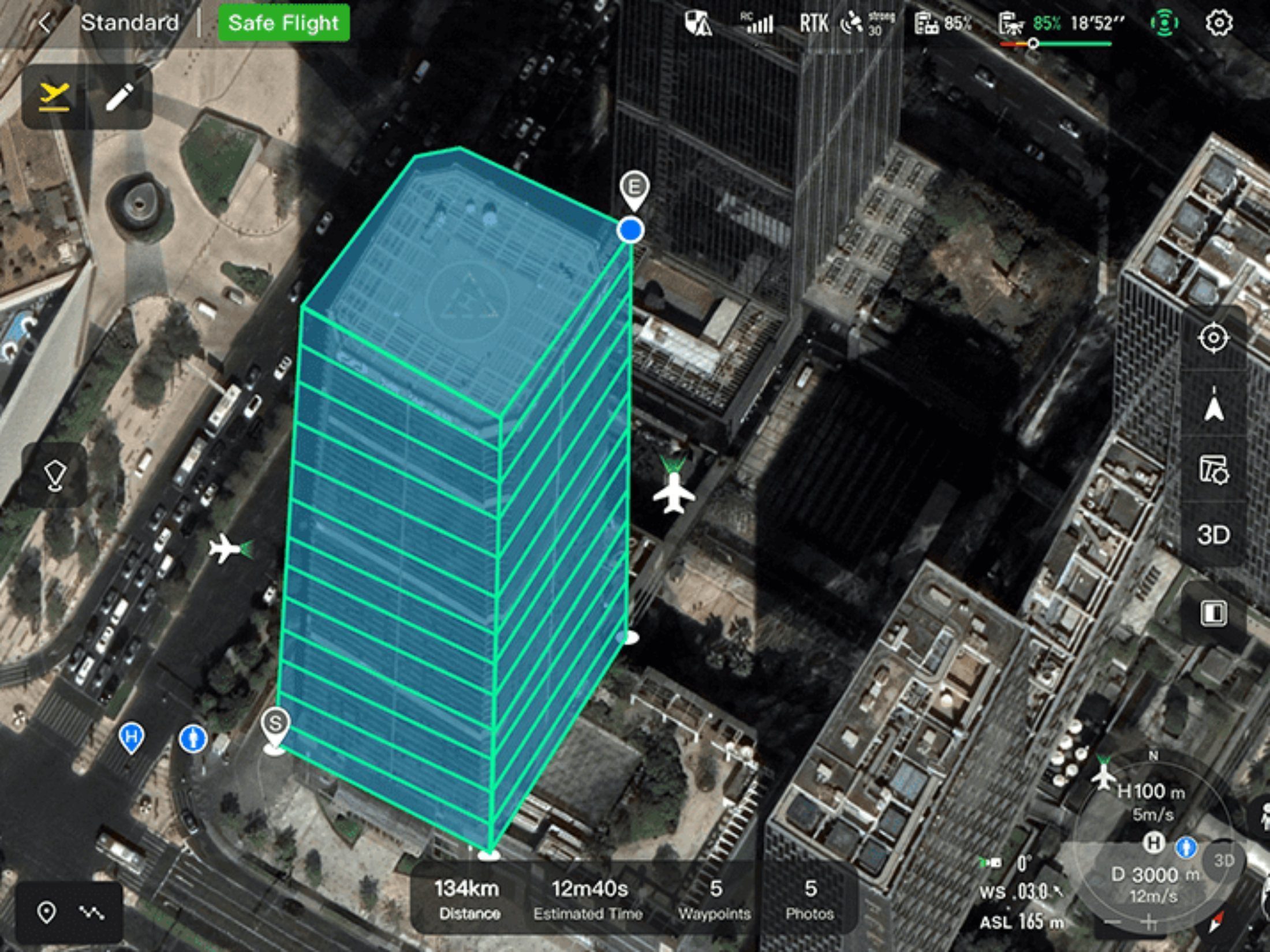
Bildquelle: Autel Robotics | ©Vertical Capture
Mit Vertical Capture („vertikale Erfassung“) arbeitet Autel Robotics an einer Lösung, die speziell zur Erfassung vertikaler Objekte geeignet ist. Damit soll die Drohne dann beispielsweise Häuser oder Windkraftanlage umkreise und aus allen Perspektiven erfassen können. Die Planung des notwendigen Pfades rund um das Objekt soll dabei automatisiert erfolgen.
 Bildquelle: Autel Robotics | ©
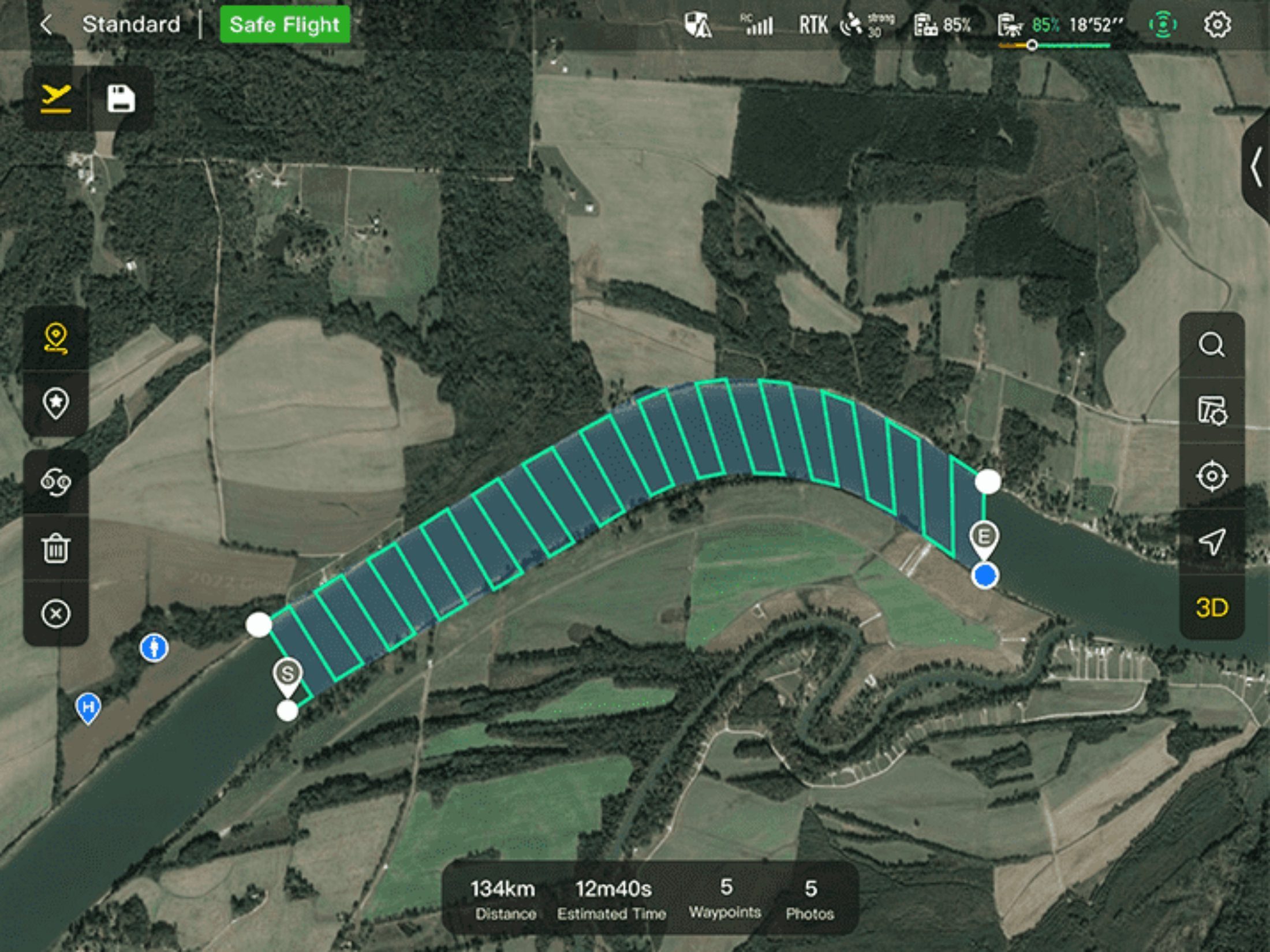
Bildquelle: Autel Robotics | ©Korridor-Missionen
Ein besonderer Missionstyp sind Korridor-Missionen. Diese Art der Planungsvorlage soll das Erstellen von Flugmissionen entlang von engen, aber großflächigen Objekten erleichtern.
Typische Einsatzgebieten wären zum Beispiel das Abfliegen der Wasseroberfläche eines Flusses oder einer Straße. Auch die vereinfachte Planung entlang von Hochspannungsleitungen oder Pipelines soll mit diesem Tool möglich sein.
 Bildquelle: Autel Robotics | ©
Bildquelle: Autel Robotics | ©Smart Features helfen bei der Flugvorbereitung
Die EVO Max 4T Serie hat zusätzlich einige sogenannte „Smart Features“ an Bord, die den Piloten bei der Planung und Vorbereitung von Flugmissionen unterstützen sollen. Diese wollen wir im folgenden Absatz kurz genauer betrachten.
3D-Planung von Flugpfaden
Die meisten Planungswerkzeuge lassen sich nicht nur auf der „platten“ 2D-Karten verwenden, sondern können mit der 3D-Ansicht auch um die Höhendimension angereichert werden.
Damit kann der Pilot dann die in unterschiedlichen Höhen gesetzten Waypoints direkt visualisieren und auf Basis des umliegenden Terrains anpassen.
 Bildquelle: Autel Robotics | ©
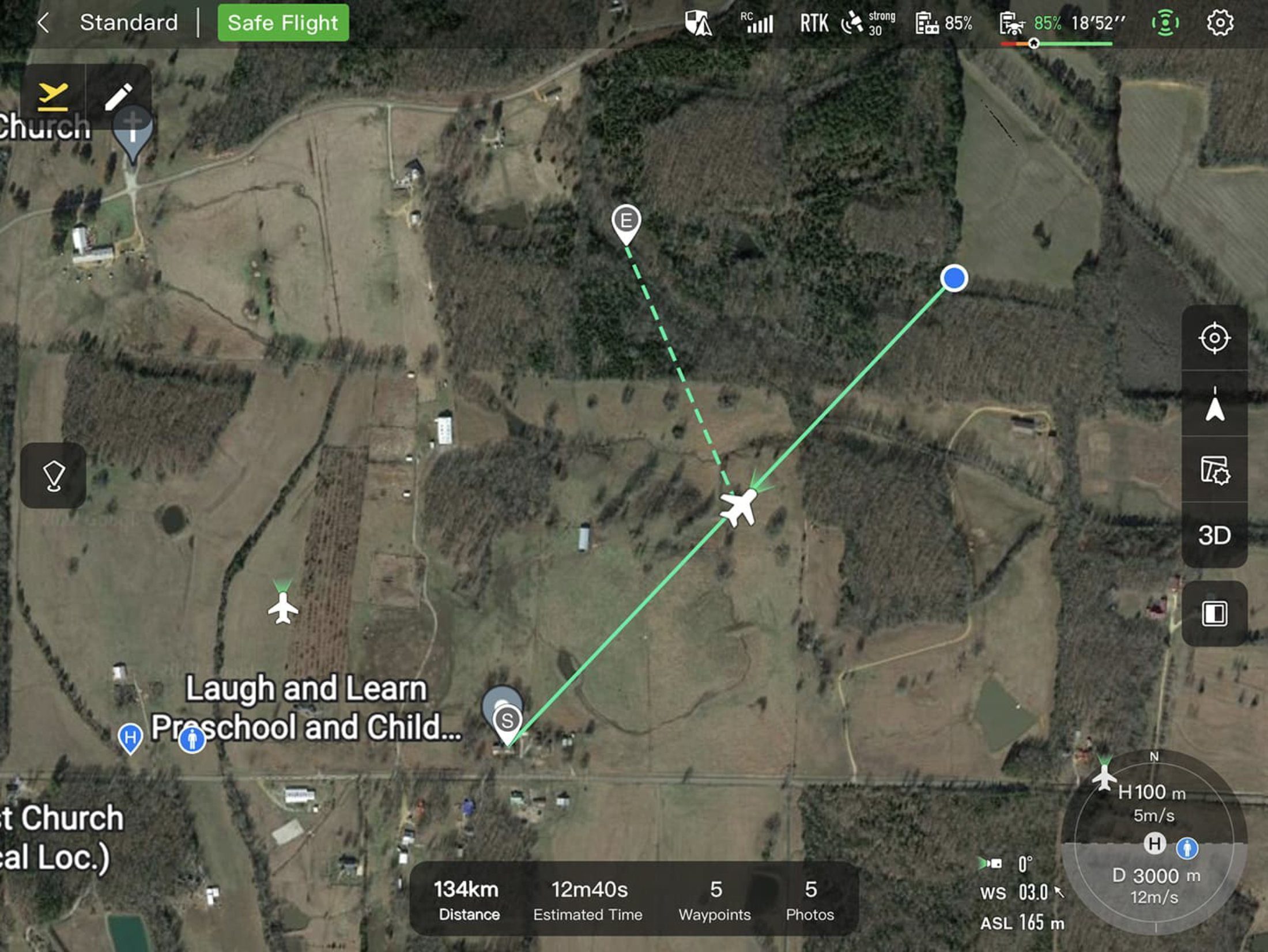
Bildquelle: Autel Robotics | ©Schnellmissionen
Sogenannte Schnellmissionen können geplant werden, während das UAV bereits beim Abarbeiten einer anderen Mission befindet. So lässt sich etwa ein „Umweg“ in den aktuellen Pfad einbauen. Am Ende soll dieses Feature mehr Flexibilität ermöglichen, sollten ad-hoc Änderungen notwendig werden, ohne die laufende Mission abbrechen zu müssen.
 Bildquelle: Autel Robotics | ©
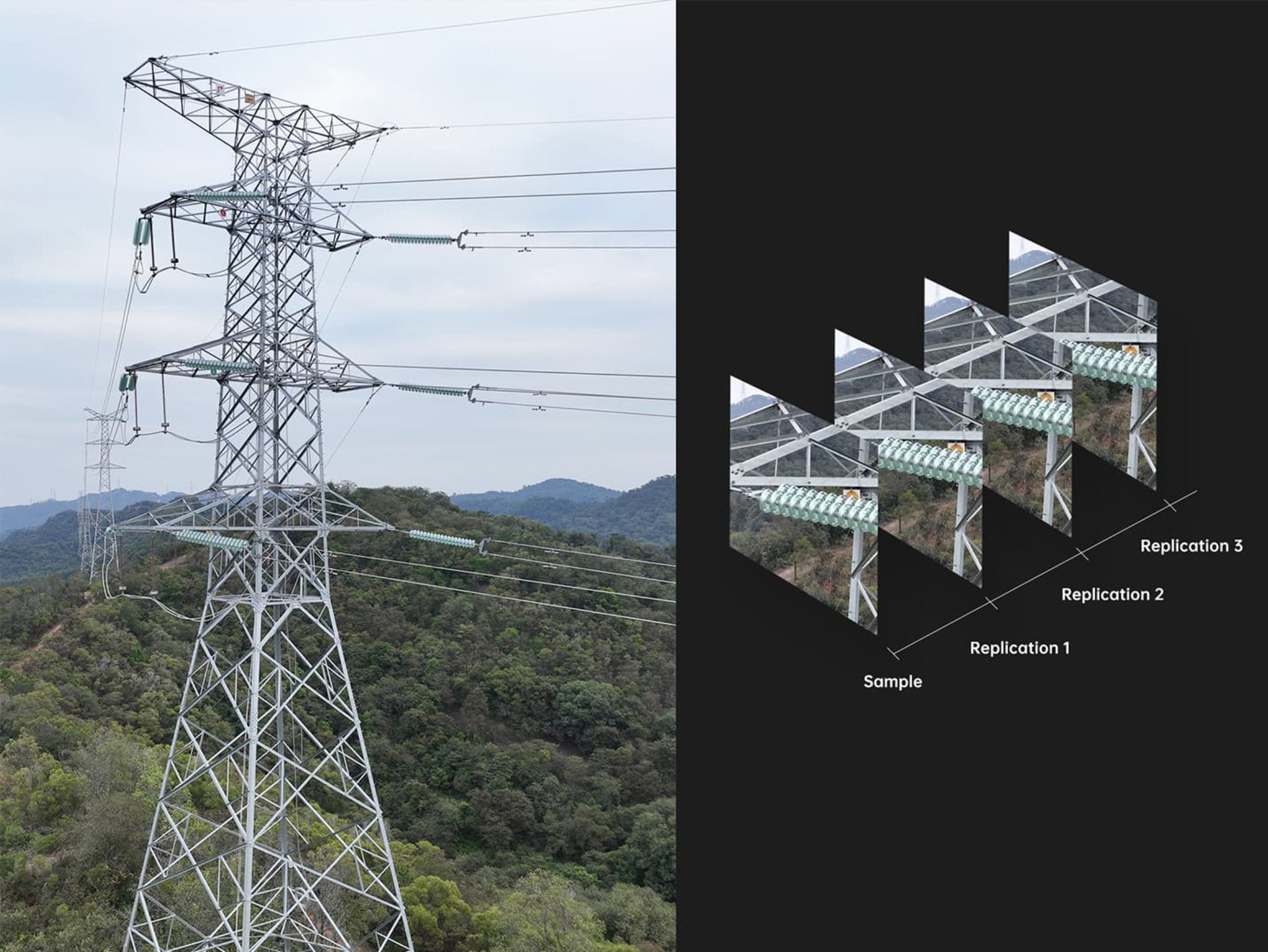
Bildquelle: Autel Robotics | ©Wiederholung von vorherigen Missionen
Egal, ob während des manuellen Fluges oder auf Basis vorher geplanter Missionen: Mit dem Reproduktions-Feature merkt sich die EVO Max 4T die durchgeführten Aufgaben inklusive der Kameraausrichtung beim Erstellen von Aufnahmen.
So sollen sich vergangene Missionen genau replizieren lassen, um unter anderem Zeitreihen einer Inspektion von ein und demselben Motiv zu erstellen, ohne den Flug jedes Mal manuell „möglichst gleich“ durchzuführen.
 Bildquelle: Autel Robotics | ©
Bildquelle: Autel Robotics | ©Schlusswort
Wir hoffen, euch hat dieser kompakte Artikel einen guten Überblick über die Funktionsweise der verschiedenen Missionstypen der EVO Max 4T UAV-Plattform von Autel Robotics gegeben.
Sollte dies der Fall sein, freuen wir uns darüber, wenn du den Artikel teilst. Bei Fragen oder Anregungen hinterlasse gerne jederzeit einen Kommentar. Auch freuen wir uns darüber, wenn du für den Kauf einer neuen Drohne einen unserer Partnerlinks verwendest (mit * gekennzeichnet), so erhalten wir eine kleine Provision.
Du bist von dem Inhalt begeistert und möchtest Drone-Zone.de unterstützen? Dann freuen wir uns natürlich riesig über eine kleine Zuwendung. Bei der nächsten Recherche und beim Erstellen des nächsten Artikels gibt es dann einen Becher Kaffee mehr für uns! :)
via Paypal
Werde auch gleich ein Abonnent auf Facebook und verpasse zukünftig keine News und Artikel mehr!
Ja, Waypoint-Missionen können in 2D und 3D geplant.
Ja, das soll mithilfe der Mission Replication möglich sein.
Ja, die automatische Planung kann auf Basis von rechteckigem oder polygenen Flächen erfolgen.
Quelle: Autel Robotics



