
Neues Y4-Konzept soll Effizienz steigern: So lange ich mich mit dem Thema Quadrocopter beschäftige, gibt es eigentlich nur einen Weg den das grundsätzliche Design letztendlich nimmt: Ein X-förmiger Rahmen mit vier Motor-Rotor-Kombinationen am Ende. Die Auswahl die bleibt: X- oder Standard-Konfiguration.
Wissenschaftlern der University of Queensland, Australien haben sich dem Thema angenommen und einen Prototypen für ein wesentlich effizienteres Quadrotor-Design entwickelt und getestet.
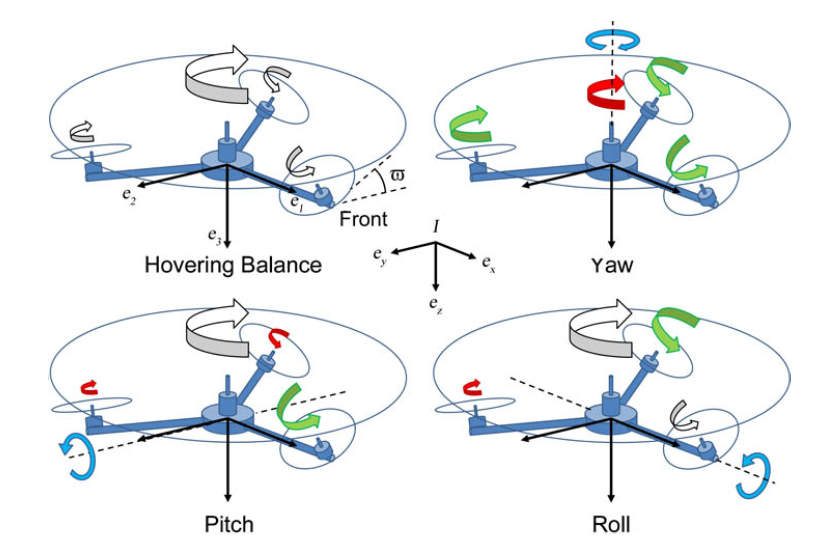
Der auf den ersten Blick seltsam anmutende Quadrocopter basiert auf einerm Y-Design. Drei Arme halten drei Motoren samt Propeller*, die allesamt im 45 Grad Winkel gegenüber der Centerplate angeordnet sind. Für den Auftrieb sorgt ein großer, mittig auf der Centerplate angeordneter Fixed-Pitch-Rotor, wie man ihn von RC-Helikoptern* kennt.
 Bildquelle: Scott Driessens and Paul E. I. Pounds / University of Queensland | ©
Bildquelle: Scott Driessens and Paul E. I. Pounds / University of Queensland | ©Das auf die Bezeichnung „Y4“ getaufte Design kann theoretisch bis zu 25% effizienter arbeiten. Dies liegt laut den Forschern daran, dass die kleinen Propeller herkömmlicher Quadrocopter schlicht und einfach einen relativ schlechten Wirkungsgrad aufweisen, verglichen mit Helicopter-Technik.
Der erstellte Prototyp trat in einem Experiment gegen ein gleichwertiges Standard-Quadrocopter-Design an. Das Ergebniss lässt sich sehen: Im autonomen Schweben übertrumpft der Y4-Copter seinen Kontrahenten mit einer 15 % längeren Flugzeit. Wer sich die Idee und Berechnungen hinter dem Y4-Desing genauer anschauen möchte, für den habe ich hier das Research Paper Towards A More Efficient Quadrotor Configuration von Scott Driessens and Paul E. I. Pounds verlinkt.
 Bildquelle: Scott Driessens and Paul E. I. Pounds / University of Queensland | ©
Bildquelle: Scott Driessens and Paul E. I. Pounds / University of Queensland | ©Quellen: IEEE.org
Die Grafiken wurden aus dem Research Paper extrahiert und unterliegen dem Copyright der Autoren!
Wer sich für die genaue Funktionsweise dieser Drohne interessiert, dem sei unbedingt ein Blick in die gesamte wissenschaftliche Veröffentlichung empfohlen (siehe Link oben).



